|
|
РћгУOpenCVЕФКЏЪ§warpPerspective()зїЭМЯёЕФЭИЪгБфЛЛ
ЭМЯёЕФЭИЪгБфЛЛЪЧжИАДееЮяЬхЕФГЩЯёЭЖгАЙцТЩНјааБфЛЛЁЃЭЈЙ§ЭИЪгБфЛЛПЩвдНЋЭМЯёЭЖгАЕНаТЕФГЩЯёЦНУцЩЯЁЃ
ЭМЯёЕФЭИЪгБфЛЛЭЈГЃгУРДНтОіЯрЛњЕФЪгЯпгыЮяЬхЫљдкЦНУцВЛДЙжБЕФЮЪЬтЁЃ
БШШчЃЌЯТУцетЗљЭМжаЃЌШчЙћЯрЛњЕФЪгЯпгые§ЗНаЮЪЧДЙжБЕФЃЌФЧУДгІИУЪЧЯТУцетбљЕФГЩЯёаЇЙћЃК

ЕЋЮвУЧЯрЛњЕФЪгЯпКмЖрЪБКђгывЊХФЩуЕФЮяЬхЦНУцВЛДЙжБЃЌБШШчЯТУцЪОвтЭМжаЕФЯрЛњгыЮяЬхЦНУцЃК

ЕБЯрЛњЕФЪгЯпгывЊХФЩуЕФЮяЬхЦНУцВЛДЙжБЪБЃЌОЭееГЩСЫЯТУцетбљЃК

ЮвУЧПЩвдРћгУЭИЪгБфЛЛЖдЩЯУцЕФЭМЯёНјаааЃе§ВйзїЁЃ
дкOpenCVПЊЗЂЛЗОГЯТЃЌЮвУЧПЩвдРћгУКЏЪ§warpPerspective()зїЭМЯёЕФЭИЪгБфЛЛЁЃ
РћгУКЏЪ§warpPerspective()зїЭМЯёЕФЭИЪгБфЛЛЧАашвЊгавЛИі3ЁС3ЕФЭИЪгБфЛЛОиеѓЃЌПЩвдРћгУКЏЪ§getPerspectiveTransform()ЕУЕН3ЁС3ЕФЭИЪгБфЛЛОиеѓЁЃ
КЏЪ§getPerspectiveTransform()ЕФдаЭШчЯТЃК
- Mat cv::getPerspectiveTransform(const Point2f src[],
- const Point2f dst[],
- int solveMethod = DECOMP_LU )
- retval=cv.getPerspectiveTransform(src, dst[, solveMethod])
ВЮЪ§втвхШчЯТЃК
srcЁЊдЭМЯёжа4ИіЯёЫиЕуЕФзјБъЃЌзЂвтзјБъжЕЕФЪ§ОнРраЭЮЊfloatЁЃ
dstЁЊФПБъЭМЯёжа4ИіЯёЫиЕуЕФзјБъЃЌзЂвтзјБъжЕЕФЪ§ОнРраЭЮЊfloatЁЃ
solveMethodЁЊбЁдёМЦЫуЭИЪгБфЛЛОиеѓЕФЗНЗЈЃЌФЌШЯжЕЮЊDECOMP_LUЃЌЦфУЖОйжЕгаШчЯТетаЉЃК
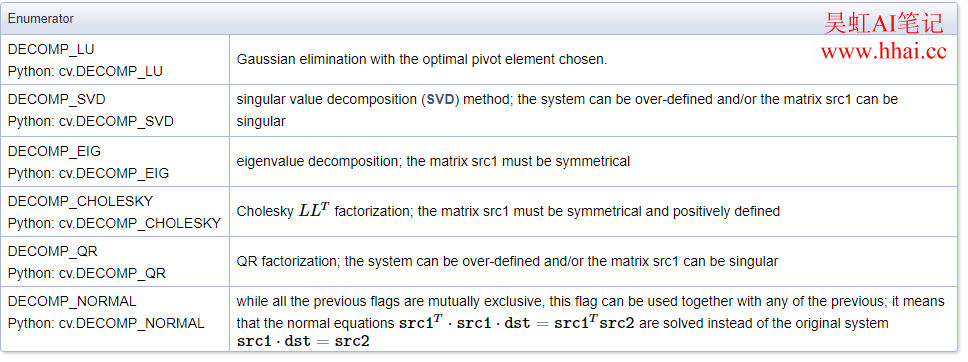
DECOMP_LUЃКзюМбжїжсдЊЫиЕФИпЫЙЯћдЊЗЈЁЃ
DECOMP_SVD ЃКЦцвьжЕЗжНт(SVD)ЗНЗЈЁЃ
DECOMP_EIG ЃКЬиеїжЕЗжНтЗЈЁЃ
DECOMP_CHOLESKY ЃКCholeskyЗжНтЗЈЁЃ
DECOMP_QR ЃКQRЗжНтЗЈЁЃ
DECOMP_NORMAL ЃКЪЙгУЙщвЛЛЏЙЋЪНЃЌПЩвдгыЧАУцЕФБъжОвЛЦ№ЪЙгУЁЃ
КЏЪ§warpPerspective()ЕФдаЭШчЯТЃК
- void cv::warpPerspective(InputArray src,
- OutputArray dst,
- InputArray M,
- Size dsize,
- int flags = INTER_LINEAR,
- int borderMode = BORDER_CONSTANT,
- const Scalar & borderValue = Scalar() )
- dst=cv.warpPerspective(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
ВЮЪ§втвхШчЯТЃК
srcЁЊЪфШыЭМЯёЁЃ
MЁЊГпДчЮЊ2ЁС3ЕФЗТЩфБфЛЛОиеѓЁЃ
dsizeЁЊЪфГіЭМЯёЕФГпДчЁЃ
dstЁЊЗТЩфБфЛЛКѓЕФЭМЯёЃЌгыЪфШыЭМЯёЕФЪ§ОнРраЭЯрЭЌЃЌЕЋЪЧГпДчгЩВЮЪ§dsizeжИЖЈЁЃ
flagsЁЊВхжЕЗНЗЈКЭе§ЗДБфЛЛЕФБъжОЮЛЁЃ
borderModeЁЊЯёЫиБпНчЭтЭЦЗНЗЈЕФБъжОЃЌЯъЧщМћВЉЮФ https://www.hhai.cc/thread-178-1-1.html
borderValueЁЊБпНчЬюГфЪБЕФЬюГфжЕЃЌФЌШЯЧщПіЯТЮЊ0ЁЃ
PythonЪОР§ДњТыШчЯТЃК
ДњТыжагУЕНЕФЭМЯёЯТдиСДНгЃК
https://pan.baidu.com/s/1ss1U5_0XbbEuXXFcTgGMUA?pwd=rlj2
[Python] ДПЮФБОВщПД ИДжЦДњТы # -*- coding: utf-8 -*-
# ГіДІЃКъЛКчAIБЪМЧЭј(hhai.cc)
# гУаФМЧТММЦЫуЛњЪгОѕКЭAIММЪѕ
# ВЉжїЮЂаХ/QQ 2487872782
# QQШК 271891601
# ЛЖгММЪѕНЛСїгызЩбЏ
# OpenCVЕФАцБОЮЊ4.4.0
import cv2 as cv
import numpy as np
import sys
if __name__ == '__main__':
# ЖСШЁЭМЯёВЂХаЖЯЪЧЗёЖСШЁГЩЙІ
img = cv.imread('F:/material/images/2022/2022-12/perspective_img2.png')
if img is None:
print('Failed to read noobcvqr.png.')
sys.exit()
h, w = img.shape[:-1]
size = (w, h)
# ЭИЪгБфЛЛЧАЕФЫФИіНЧЕузјБъ
src_points = np.array([[65, 70], [198, 67], [50, 164], [205, 163]], dtype='float32')
# ЩшжУЭИЪгБфЛЛКѓЫФИіНЧЕузјБъ
max_pt = np.max(src_points)
dst_points = np.array([[50, 50], [180, 50], [50, 180], [180, 180]], dtype='float32')
# МЦЫуЭИЪгБфЛЛОиеѓ
rotation = cv.getPerspectiveTransform(src_points, dst_points)
# ЭИЪгБфЛЛЭЖгА
img_warp = cv.warpPerspective(img, rotation, size)
# еЙЪОНсЙћ
cv.imshow('src_img', img)
cv.imshow('perspective_img', img_warp)
cv.waitKey(0)
cv.destroyAllWindows()
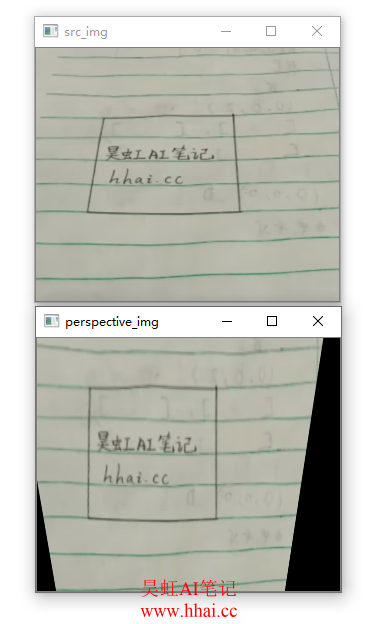
ДњТыЫЕУїЃК
ЭИЪгБфЛЛЧАЕФЫФИіЕубЁШЁЕФОЭЪЧЭМжае§ЗНаЮПђЕФЫФИіНЧЕуЁЃ
ЭИЪгБфЛЛКѓЕФЫФИіЕуЕФзјБъОЭИљОнздМКЕФашвЊздМКЩшЖЈСЫЃЌВЛЙ§вВВЛЪЧЫцБуЩшЖЈЃЌБШШчдкЩЯУцЕФДњТыжаЃЌЮвЯЃЭћЭИЪгБфЛЛКѓЕФе§ЗНаЮЪЧеце§ЕФе§ЗНаЮЃЌФЧУДЫФИіЕуЕФзјБъСЌНгЦ№РДЯдШЛгІИУЪЧвЛИіЪЧе§ЗНаЮЁЃ
дЫааНсЙћШчЯТЭМЫљЪОЃК
C++ДњТыднТдЃЌашвЊC++ЕФХѓгбПЩвдСЊЯЕъЛКчО§ЃЌъЛКчО§ПЩвдАбЩЯУцЕФДњТыИФЮЊC++ДњТыЁЃ |
|







